
Stepper Motor Driver
by Seeed Studio
SKU 3670
Save 33%
Original Price
£5.99
inc VAT
Current Price
£4.01
inc VAT
£3.34 ex VAT
£3.34 ex VAT
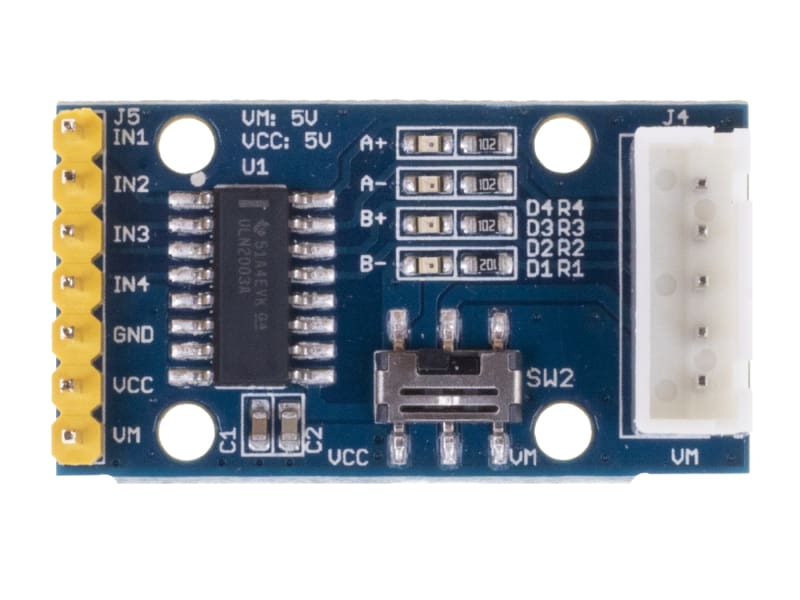
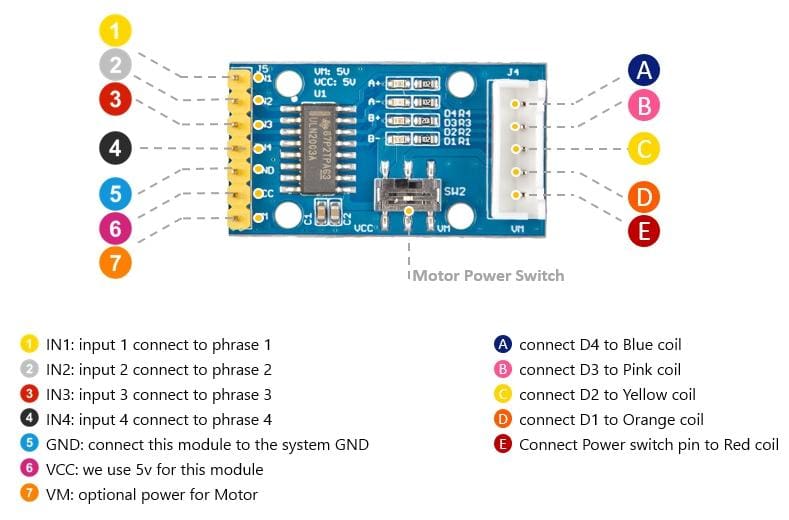
Have a nice new stepper motor but can't find any suitable driver to use it with? This tiny, and high-performance motor driver is waiting for you! This version of the Stepper Motor Driver V1.0 has proven to be versatile across a wide range of applications, including solenoids, relays, lamps, small motors, LEDs and etc. What's more, it can operate over a wide temperature range (about –40°C to 105°C).
- ULN200x, ULQ200x High-Voltage, High-Current Darlington Transistor Arrays
- Launch from LEDs to desk printers
- Compact size for easy deployment
- Work under the condition of a long-range temperature
- Dimensions: 35 x 20 x 12mm